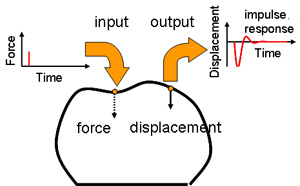
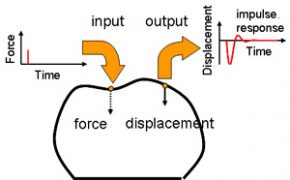
弾性仮想物体の動的な変形に伴う力覚表現の実現手法について検討した。インパルス応答変形モデルでは、物体の力に伴う変形をインパルス力に対する時系列的な変形パターンとして記録する。インタラクションに伴う変形は、作用力とインパルス応答とのたたみ込みとして求められる。この手法の利点は、インタラクションに伴う力の計算がモデルの複雑さに直接的には依存しないこと、変形の計算はモデルの複雑さに対して1次のオーダーであることであり、仮想環境における実時間操作の実現に適している。

- Kazuyoshi Tagawa, Koichi Hirota, Michitaka Hirose: Impulse Response Deformation Model: an Approach to Haptic Interaction with Dynamically Deformable Object; Proc. Haptics Symposium 2006, 209-215, 2006.3.
- Kazuyoshi Tagawa, Koichi Hirota, Michitaka Hirose: Manipulation of Dynamically Deformable Object Using Impulse-Based Approach, Advances in Haptics, 315-331, InTech, 2010
