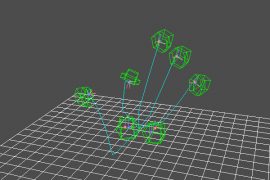
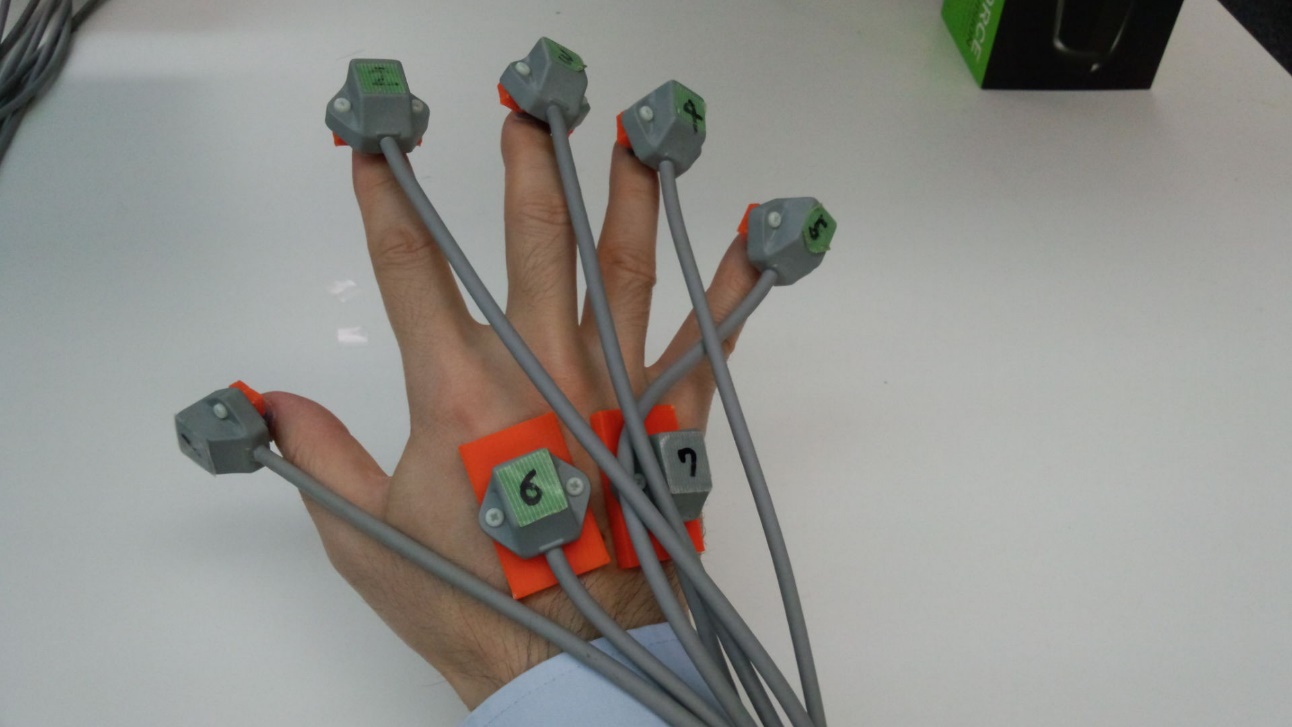
手の関節角の計測にはグローブ型のセンサが広く使われている。しかし、多くのグローブは手の自由度に比べて自由度が少なく、センサの構造から精度も低いものが多い。本研究では、骨とほぼ剛に接続されている爪の位置姿勢を計測し、これをもとに関節角を推定する手法を開発している。
※この研究は科研費基盤研究(B)25280072の支援を受けて実施された。

手の関節角の計測にはグローブ型のセンサが広く使われている。しかし、多くのグローブは手の自由度に比べて自由度が少なく、センサの構造から精度も低いものが多い。本研究では、骨とほぼ剛に接続されている爪の位置姿勢を計測し、これをもとに関節角を推定する手法を開発している。
※この研究は科研費基盤研究(B)25280072の支援を受けて実施された。

