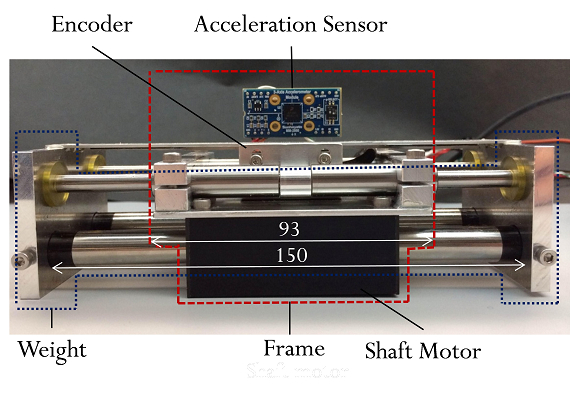
慣性力の提示は重心の移動の提示と等価である。本研究では、力出力の特性改善と重心移動範囲の拡大を目的として新たなデバイスを開発した。現在、このデバイスによる提示と実物との比較の実験を行っている。具体的には、剛物体の入った箱、水の入ったボトルについて、これと同様の状況をデバイスにより提示し、内容物の重さの弁別特性について、実物とデバイスとで評価している。
- Takeshi Yamamoto, Koichi Hirota: Device for Estimating Weight and Material of Contents of Boxes by Shaking; Proc. EuroHaptics 2014, (in Press), 2014

