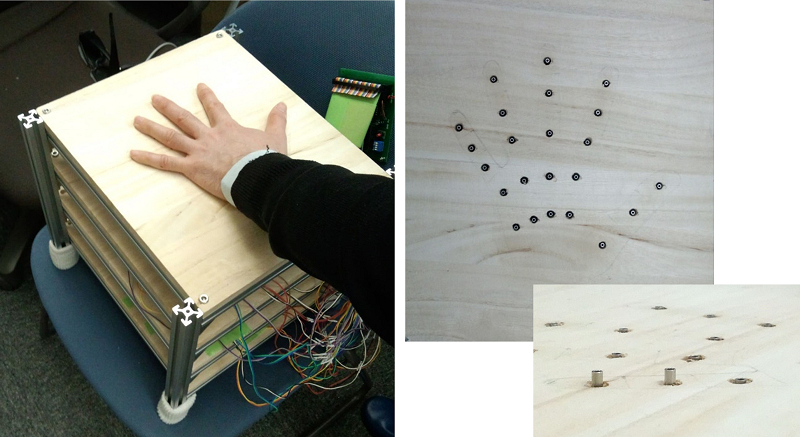
触力覚の対側提示[2014-2015] 2023.03.01 触力覚デバイスの実装の困難の原因の一つは、手のもつ複雑な形状と多くの自由度にある。これにより自由度の高いデバイスは装着が手の動きを妨げることになる。もし手を使う操作の際に生じる触力覚情報を別の部位に提示することができて、この触力覚情報と操作にともなう運動の感覚と統合して解釈することができれば、デバイスの実装を容易にすることができる。本研究ではそのための予備的な検討として、反対側の手に触力覚を提示した場合の操作性を評価している。 振動デバイス 圧覚デバイス