
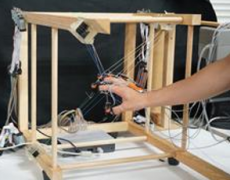
右手の5指への力覚提示を実現する力覚デバイスSPIDAR-Uを開発した。手指の姿勢を磁気センサにより計測することを前提に、フレームを磁界への影響が小さい木材で、機構部品の多くをプラスティックで構成し、モータなどを作業領域から遠ざけて配置している。物体との接触に伴う力は、研究室で開発された変形手モデルをベースに柔らかさの非線形性を近似的に取り入れた計算手法を導入した。これにより、主観的には操作性が向上したと感じている。現在、システムの定量的評価について検討している。
※この研究は東工大の佐藤・赤羽研究室との共同研究です。
※この研究は科研費基盤研究(B)JP25280072の支援を受けて実施された。

- 内山 貴雄, 赤羽 克仁, 佐藤 誠, 広田 光一: 磁気的干渉の少ない多指力覚提示装置の提案; 日本VR学会研究報告, HDC17, No.7, 2016

