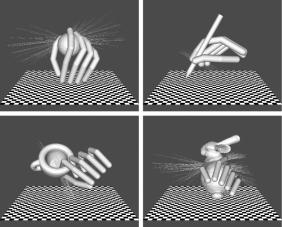
干渉応答計算にもとづく物体操作について検討した。ユーザの手指を干渉点の集合として表現し、それぞれの点における接触力を計算する。これらの反作用の総和としての力およびトルクにより物体を運動させることで、物理ベースの操作を実現する。


- K.Hirota, M.Hirayama, A.Tanaka, M.Hirose, T.Kaneko: Physically-Based Simulation of Object Manipulation; Proc. ASME DSCD 2000 (DSC-Vol.69-2), 1167-1174, 2000.11.
- K.Hirota, M.Hirose: Dexterous Object Manipulation Based on Collision Response; Proc. IEEE VR 2003, 232-239, 2003.3.
- K.Hirota, M.Hirayam, A.Tanaka, T.Kaneko: Spatial Constraint Method – A new approach to real-time haptic interaction in virtual environments; Presence, 13(3), 355-370, 2004.
