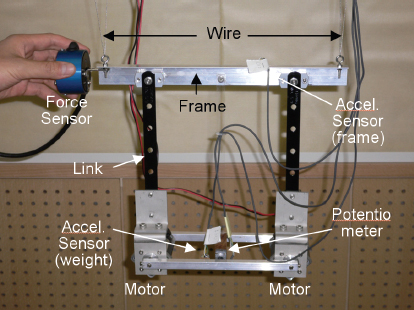
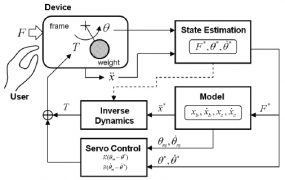
「振ってみる」インタラクションの基本は、ユーザが箱に与える運動とそれに伴う慣性力との関係性にある。そこで、慣性力を提示するデバイスとその制御システムについて検討した。このプロトタイプでは、振り小型の機構により慣性力を発生する。箱に作用する外力(手からの力)の推定、VRモデルに基づく箱の加速度の計算、これを実現するトルクの計算からなる制御ループにより、インタラクションが可能になる。
- K. Hirota, Y. Sekiguchi: Inertial force display – concept and implementation; Proc. ISUC2008, 281-284, 2008
- Koichi Hirota, Yuichiro Sekiguchi: Transmission of Information Through Haptic Interaction; Proc. HCII 2009, LNCS 5622, 313-317, 2009

