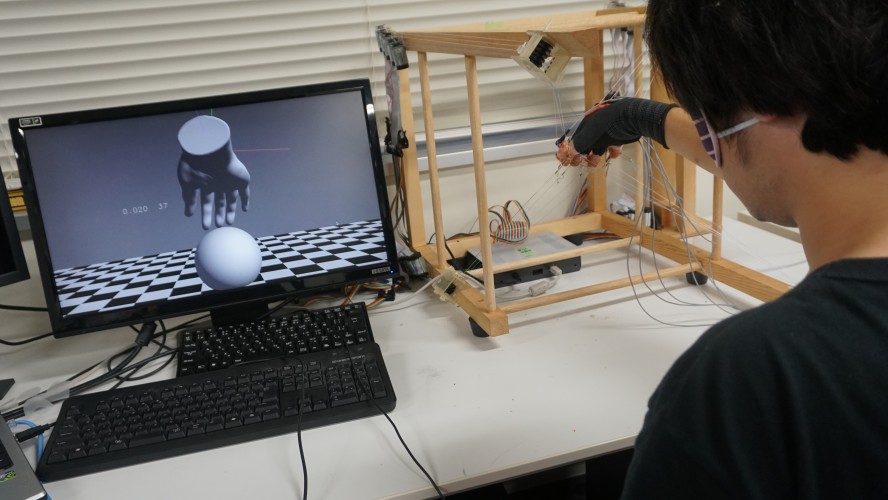
操作における触力覚情報の必要性は古くから指摘されている。触力覚が操作に果たす役割は、把持の認識、運動の拘束、作用力の認識など様々であるが、本研究では、対象の認識に着目した。すなわち、触力覚を通して対象の形状やそれにまつわる属性を取得することに着目した。形状の認識には触覚情報の面的な広がりが重要であると考えられる。SPIDAR-Uによる指先5点への力覚提示は、従来の道具型デバイスによるペン先への力提示に比べて空間的な広がりを持つことから、上述の目的に効果があると期待される。本研究では、形状認識の特性の評価を試みている。
※この研究は東工大の佐藤・赤羽研究室との共同研究です。
※この研究は科研費挑戦的萌芽研究JP16K12474の支援を受けて実施されている。


- 藤岡, 広田, 野嶋, 赤羽, 佐藤: 力覚提示システムを用いた触認識に関する評価; VR学会第21大会予稿集, 32A-03, 2016.9.

